Tìm Hiểu Mạng CAN Trên Ô Tô
Controller Area Network (CAN) là giao thức giao tiếp nối tiếp hỗ trợ mạnh cho những hệ thống điều khiển thời gian thực phân bố (distributed realtime control system).
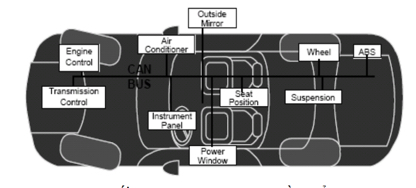
CAN đặc biệt được ứng dụng nhiều trong ngành công nghiệp Ô tô.
Giới thiệu
CAN đầu tiên được phát triển bởi nhà cung cấp phụ tùng xe ôtô của Đức Robert Bosch vào giữa những năm 80. Để thỏa mãn yêu cầu ngày càng nhiều của khách hàng trong vấn để an toàn và tiện nghi, và để tuân theo yêu cầu việc giảm bớt ô nhiễm và tiêu thụ năng lượng, ngành công nghiệp ôtô đã phát triển rất nhiều hệ thống điện tử như hệ thống chống trượt bánh xe, bộ điều khiển động cơ, điều hòa nhiệt độ, bộ đóng cửa v.v…Với mục đích chính là làm cho những hệ thống xe ô tô trở nên an toàn, ổn định và tiết kiệm nhiên liệu trong khi đó giảm thiểu việc đi dây chằng chịt, đơn giản hóa hệ thống và tiết kiệm chi phí sản xuất, thì mạng CAN đã được phát triển.
Ngày nay, CAN đã được chuẩn hóa thành tiêu chuẩn ISO11898. Hầu như mọi nhà sản xuất chip lớn như: Intel, NEC, siemens, Motorola, Maxim IC, Fairchild, Microchip, Philips, Texas Instrument, Mitsubishi, Hitachi, STmicro… đều có sản xuất ra chip CAN, hoặc có tích hợp CAN vào thành periperal của vi điều khiển. Việc thực hiện chuẩn CAN trở nên cực kỳ đơn giản nhờ sự hỗ trợ từ rất nhiều nhà sản xuất chip đó.
Điểm nổi trội nhất ở chuẩn CAN là tính ổn định và an toàn (reliability and safety). Nhờ cơ chế phát hiện và xử lý lỗi cực mạnh, lỗi CAN messages hầu như được phát hiện. Theo thống kê, xác suất để một message của CAN bị lỗi không được phát hiện là:
Ví dụ: cho rằng nếu giả sử cứ 0.7s thì môi trường tác động lên đường truyền CAN làm lỗi 1bit. Và giả sử tốc độ truyền là 500 kbits/s. Hoạt động 8 h/ngày và 365 ngày/ năm. Thì trong vòng 1000 năm trung bình sẽ có một frame bị lỗi mà không phát hiện.
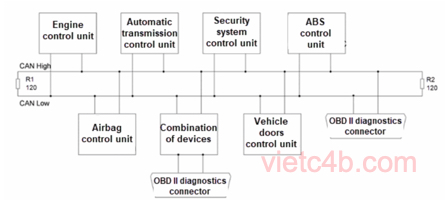
Miền ứng dụng của CAN trải rộng (from hight speed networks to low cost multiplex wiring) : hệ thống điện xe ô tô, xe tải, đơn vị điều khiển động cơ (engine control units), sensor, PLC comunication, thiết bị y tế…. Ngày nay CAN chiếm lĩnh trong ngành công nghiệp Ô tô. Trong những chiếc xe hơi đời mới thường có một mạng CAN high speed dùng điều khiển động cơ và thắng… một mạng CAN lowspeed dùng điều khiển những thiết bị khác như kiếng hậu, light…
Chuẩn Field bus Device net, CANopen, J1939 thường dùng trong công nghiệp chính là chuẩn CAN mở rộng. (Physical layer và MAC sublayer của các chuẩn này là CAN).
1. Nguyên lý hoạt động.
1.1 Mạng CAN
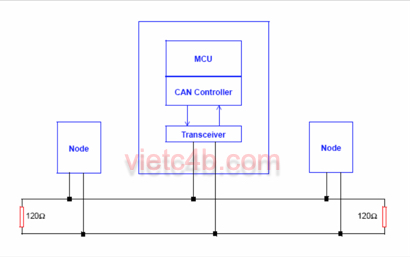
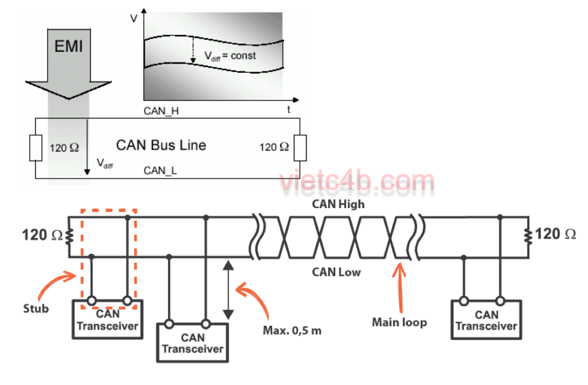
CAN có đường dây dẫn đơn giản
gồm 2 dây CAN_H và CAN_L, tạo thành 1 Bus, các thiết bị được nối chung trên 2 dây này và gọi là 1 node trong mạng.
Sự truyền dữ liệu thực hiện nhờ tính toán vi sai trên cặp dây truyền tín hiệu, có nghĩa là chúng ta đo sự chênh lệch điện áp giữa CAN_H và CAN L.
1.2 CAN Node
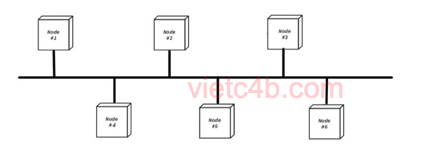
Mạng CAN được tạo thành bởi một nhóm các nodes. 1 node gồm:
- Một thiết bị hỗ trợ xử lý điện áp trên bus- CAN Transceiver.
- Một MCU hỗ trợ Can Controller, chính là giao thức CAN. MCU ngoài việc nhận và xử lý data còn thực hiện chức năng của node.
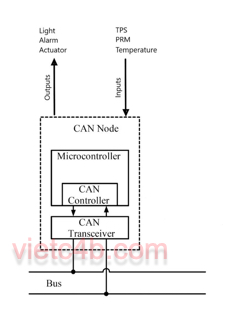
Transceiver
Bộ transceiver hỗ trợ cho 1 node truyền dữ liệu lên Bus, đồng thời sẽ nhận lại tín hiệu vừa truyền đi.
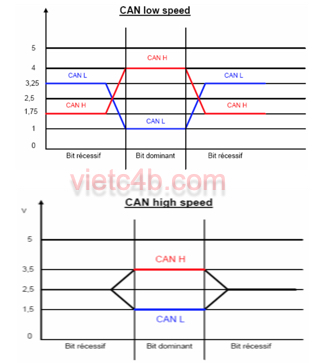
Trạng thái “dominant” và “recessive”
Bus CAN định nghĩa hai trạng thái điện áp là “dominant” và “recessive”, tương ứng với hai trạng thái bit là 0 và 1. Hai trạng thái này sẽ được xử lý bởi Transceiver của Node. Có 2 loại CAN tương ứng với các giá trị điện áp khác nhau.
Tính chất
Vì tính chất vi sai trên đường truyền tín hiệu của bus CAN, tín hiệu nhiễu sẽ ảnh hưởng đến giá trị điện áp.
CAN bus thường được xoắn 2 dây vào nhau để triệt tiêu nhiễu.
Nguyên tắc hoạt động
- Thông điệp dữ liệu được truyền từ bất kỳ nút nào trên bus CAN không chứa địa chỉ của nút truyền hoặc của bất kỳ nút nhận dự kiến nào.
- Thay vào đó, nội dung của thông điệp được gắn nhãn bởi một số nhận dạng (ID) là duy nhất trên toàn mạng.
- Tất cả các nút khác trên mạng đều nhận được thông điệp và mỗi nút thực hiện kiểm tra sự chấp nhận trên mã ID để xác định xem thông điệp có liên quan đến nút đó hay không. Nếu thông điệp có liên quan, nó sẽ được xử lý, nếu không thì nó bị bỏ qua
Tranh chấp trên BUS
Giao thức CAN cho phép các nút khác nhau gửi dữ liệu cùng lúc. Một mạng CAN có thể gồm nhiều node với lượng dữ liệu truyền lên Bus rất lớn. Chỉ 1 node được phép truyền tại 1 thời điểm.
Data Frame và Remote Frame làm việc theo cơ chế phân xử quyền ưu tiên của tín hiệu vì thế cấu trúc của chúng có vùng phân xử quyền ưu tiên – ID của Frame.
Khi phân xử, bit ID có giá trị 0 sẽ được ưu tiên hơn.
Node sẽ dựa vào giá trị điện áp trên bus để quyết định.
CAN Frame
Dữ liệu CAN được truyền dưới dạng các Frame (khung). Một khung có dạng chung như sau:
Chuẩn CAN định nghĩa bốn loại Frame:
- Data frame dùng khi node muốn truyền dữ liệu tới các node khác
- Remote frame dùng để yêu cầu truyền data frame.
- Error frame và overload frame dùng trong việc xử lý lỗi.
Dùng để truyền dữ liệu. Có hai dạng: Standard Frame và Extended Frame
Cấu trúc của 1 data Frame có thể minh họa chi tiết như sau:
Data Frame CAN bao gồm bảy trường bit khác nhau:
Trường bắt đầu(Start Of Frame Field – SOF): Độ dài 1 bit đầu của frame, giá trị Dominant báo hiệu bắt đầu của 1 frame.
Trường xác định quyền ưu tiên (Arbitration Field): Định dạng vùng xác định quyền ưu tiên
- Định dạng chuẩn: vùng xác định quyền ưu tiên có độ dài 12 bit, bao gồm 11 bit ID và 1 bit RTR.
- Định dạng mở rộng: trường xác định quyền ưu tiên có độ dài 32 bit, bao gồm có 29 bit ID, 1 bit SRR, 1 bit IDE và 1 bit RTR.
- Bit RTR (Remote Transmission Request): dùng để phân biệt khung là Data Frame hay Remote Frame (0- Data frame, 1- Remote frame).
- Bit SRR (Substitute Remote Request): chỉ có ở khung mở rộng, có giá trị là 1.
- Bit IDE (Identifier Extension): bit phân biệt giữa loại khung chuẩn và khung mở rộng:
- IDE = 0 – khung chuẩn, IDE = 1 – khung mở rộng.Bit này nằm ở trường xác định quyền ưu tiên với khung mở rộng và ở trường điều khiển với khung chuẩn.
3. Trường điều khiển (Control Field): có định dạng khác nhau ở trường này:
Khung chuẩn gồm IDE, r0 và DLC (Data Length Code).
Khung mở rộng gồm r1, r0 và DLC.
- Bit r0, r1 (hai bit dự trữ): phải được truyền là Recessive Bit bởi bộ truyền nhưng bộ nhận không quan tâm đến giá trị 2 bit này.
- DLC (Data Length Code): Có độ dài 4 bit quy định số byte của trường dữ liệu của Data Frame, Chỉ được mang giá trị từ 0 đến 8.
4. Trường dữ liệu (Data Field): chứa data, có độ dài từ 0 đến 8 byte tùy vào giá trị của DLC ở trường điều khiển.
5. Trường kiểm tra (Cyclic Redundancy Check Field – CRC): gồm 16 bit và được chia làm hai phần:
- CRC Sequence: gồm 15 bit CRC tuần tự
- CRC Delimiter: là một Recessive Bit làm nhiệm vụ phân cách trường CRC với trường phía sau.
6. Trường xác nhận (Acknowledge Field – ACK): có độ dài 2 bit và bao gồm hai phần:
- ACK Slot: có độ dài 1 bit, Node truyền dữ liệu sẽ truyền bit này là Recessive. Khi một hoặc nhiều Node nhận chính xác giá trị thông điệp (không có lỗi và đã so sánh CRC Sequence trùng khớp) thì nó sẽ báo lại cho bộ truyền bằng cách truyền Dominant Bit ngay vị trí ACK Slot (tương tự việc kéo SDA trong I2C).
- ACK Delimiter: có độ dài 1 bit, nó luôn là một Recessive Bit ⇒ ACK Slot luôn được đặt giữa hai Recessive Bit là CRC Delimiter và ACK Delimiter.
7. Trường kết thúc (End Of Frame Field – EOF): thông báo kết thúc một Data Frame hay Remote Frame. Trường này gồm 7 Recessive Bit.
Remote Frame
Cấu trúc 1 Remote Frame tương tự Data frame, tuy nhiên Remote Frame có Bit RTR =1 và không có trường data (Bit DLC =0).
Error Frame
Frame lỗi bao gồm 2 phần:
– Cờ lỗi
– Phần delimiter
Ovlerload Frame
Dùng khi node bị tràn bộ đệm.